Ensenso SDK Eine Software für alle Ensenso 3D Kameras
Das kostenlose Ensenso SDK stellt eine einheitliche Schnittstelle zu den Ensenso 3D-Kameras bereit.
Ensenso PartFinder
Der Ensenso PartFinder bietet Ihnen die Möglichkeit, eigene CAD Geometrien zu laden und diese in den Punktwolken Ihrer Ensenso 3D Kameras wiederzufinden. Durch die kombinierte Nutzung von Tiefeninformationen, Oberflächennormalen und Texturdaten lassen sich selbst knifflige Lokalisierungsaufgaben robust lösen. Die PartFinder-Funktionalität ist in der normalen NxLib enthalten, Sie benötigen jedoch eine separate Lizenz, um sie zu nutzen. Wir stellen Ihnen die Funktionsweise in dieser IDS Vision Channel Session genauer vor.

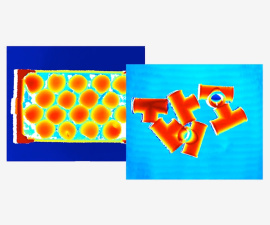
Semi-Global-Matching
Hochgradig parallelisiertes Semi-Global-Matching sorgt für dichte, qualitativ hochwertige Punktwolken.

Arbeitsbereich-Kalibrierung
Setzen Sie den Ursprung des Arbeitsbereichs einfach mithilfe einer Kalibrierplatte.

Virtuelle Ansichten
Telezentrische Höhenbilder mit fester Pixelgröße ermöglichen eine stark vereinfachte Datenverarbeitung.

Hand-Auge-Kalibrierung
Referenzieren Sie eine robotergeführte oder fest installierte Stereokamera zum Roboterkoordinatensystem.

Primitive Fitting
Extrahieren Sie Grundkörper wie Ebenen, Kugeln oder Zylinder aus den aufgenommenen Punktwolken.

Pattern Tracking
Messen Sie die Kalibrierplattenposition mikrometergenau und die Rotation in Echtzeit.

JSON basierte API
Nutzen Sie die strukturierte, objektorientierte und leicht erweiterbare API für C, C++, C# basierend auf dem JSON Format.

Remote Connectivity
Mit API Zugang über DLL-Schnittstellen oder TCP, können Sie Prozessdaten oder Parameter einfach austauschen.

Multi-View
Für texturierte Punktwolken kombinieren Sie mehrere Stereokameras zu einem gemeinsamen Aufnahmesystem.

Scene Rendering
Erhalten Sie eine virtuelle 3D-Darstellung der aufgenommenen Oberflächen aller Stereokameras.

PatchMatch Stereo Matching
Der randomisierte Algorithmus zum Finden von Übereinstimmungen von verschiedenen Bildausschnitten ermöglicht das Stereo Matching über den kompletten Arbeitsbereich in einem Durchlauf (verwendbar mit und ohne FlexView).
NxView
NxView ist ein Beispielprogramm mit Source-Code, welches die Hauptfunktionen der NxLib Bibliothek demonstriert. Es lassen sich eine oder mehrere Stereo- und Farbkameras öffnen, deren Bild- und Tiefendaten visualisiert werden. Parameter wie Belichtungszeit, Binning, AOI und Tiefenmessbereich lassen sich live anpassen.
NxLib
NxLib ist die zentrale Bibliothek des SDK. Sie enthält den Stereomatching-Algorithmus, sowie alle Kalibrier- und Verarbeitungsfunktionen.
HALCON Interface
Über das HALCON Image Acquisition Interface können Ensenso Kameras problemlos aus HALCON und HDevelop angesprochen werden.
Beispielprogramme
HDevelop Scripts und zahlreiche C, C++ und C# Beispielprogramme erleichtern den Einstieg und den Umgang mit der NxLib API. Das Demoprogramm NxView ist ebenfalls kostenlos als Source Code verfügbar.