Automatische 3D-Erkennung und Bedrucken von Holzbalken
Holzauge sei wachsam
Holz ist weltweit vom Volumen und von der Masse her der bedeutendste Rohstoff. Das Naturmaterial ist zugleich einer der ältesten Baustoffe und wird immer beliebter: Holz ist ökologisch, wohngesund und vermittelt mehr als jedes andere Baumaterial ein Gefühl von Behaglichkeit. In den vergangenen zehn Jahren hat sich der Marktanteil von Holzhäusern auf 15 Prozent aller hierzulande gebauten Häuser verdoppelt. Der Produktionsschwerpunkt verlagert sich dabei von der Baustelle in die Werkshalle der Zimmerei. Dort spielt Automatisierung zunehmend eine Rolle, um möglichst kosten- und zeiteffizient und damit zukunftsfähig aufgestellt zu sein. Aktuelles Beispiel: Das Zentrum für Telematik e.V. mit Sitz in Würzburg hat für das Unternehmen Georg Schumann GmbH & Co. KG, Igersheim, eine Robotik-Lösung zur automatischen Beschriftung von Holzbalken entwickelt.
Anwendung
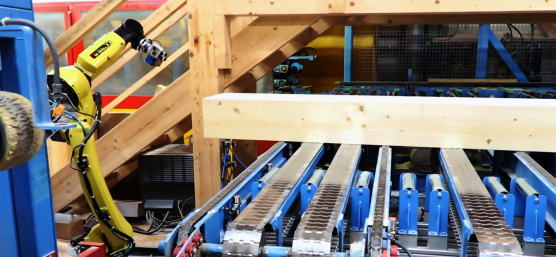
Die Firma Schumann bietet über ein Sägewerk und den angeschlossenen Holzhandel einen vollautomatischen Abbundservice. Dort werden Holzbalken in unterschiedlichsten Varianten gefertigt, die bislang alle von Hand beschriftet wurden. Bei der Beschriftung geht es in diesem Fall um die numerische Kennzeichnung einer für den Kundenbedarf, das heißt in der Regel für den Zimmermann, zugeschnittenen Bauholzliste. Darüber hinaus kann das System beispielsweise auch zur Kennzeichnung von Zertifizierungen (Nachhaltigkeit, Herkunft) oder Sortierungen (nach Qualität, Stärke, Trocknungsgrad und Verwendungszweck) eingesetzt werden. Um den Beschriftungsprozess zu automatisieren, wurde ein System entwickelt, in das ein Industrieroboter, eine 3D-Kamera und ein kompaktes Tinten-Drucksystem integriert sind. Die Lösung ermöglicht die automatische Bestimmung möglicher Druckflächen, die Auswahl der Druckposition sowie der optimalen Ausrichtung und Größe der Schrift.

Um in einem Palettenstapel später gut sichtbar zu sein, muss der Druck möglichst auf der Balken-Vorderseite erfolgen. Dabei muss die Kamera die unterschiedliche Form und Position der Holzbalken erkennen: Jeder Balken verfügt beispielsweise über andere Schrägen, Zapfen oder Vertiefungen im Druckbereich. Darüber hinaus ist die Lage der Balken vor dem Roboter durch Varianz bzw. Toleranzen im vorgelagerten Produktionssystem nie ganz gleich. Erforderlich ist dafür ein Bildverarbeitungssystem, mit dem der Roboter die jeweilige Position und die 3D-Oberflächen jedes Balkens schnell, zuverlässig und präzise erfassen kann.
Zur Erfassung der Balken-Lage und -Geometrie wird eine Ensenso N35-Kamera eingesetzt. Sobald das Holz in Druckposition liegt, platziert der Roboter die am Flansch montierte Kamera automatisch so, dass sie die Oberflächen des Balkens erfassen kann. Bei Bedarf wird die Kamera vom Roboter an mehreren Seiten um den Holzbalken herum positioniert, um verschiedene Ansichten der unterschiedlichen Seiten des Balkens zu ermöglichen.
 …")
Die Kamera sieht dabei die Spitze der Holzbalken in mittlerem Abstand (~40-90 cm) aus verschiedenen Schrägperspektiven. Sie ist mit zwei monochromen CMOS-Sensoren (Global-Shutter, 1280 x 1024 Pixel), GigE-Schnittstelle, verschraubbaren GPIO-Steckverbindern für Trigger und Flash sowie einem Projektor ausgestattet. Die im Modell N35 integrierte Flex View-Technik ist besonders für die 3D-Erfassung stehender Objekte und für Arbeitsabstände bis 3.000 mm geeignet. Dabei kann die Position der Projektormaske im Lichtstrahl linear in sehr kleinen Schritten verschoben werden. Folglich verschiebt sich die projizierte Textur auf der Objektoberfläche der Szenenobjekte ebenfalls und erzeugt andere Hilfsstrukturen. Mehrere Bildpaare derselben statischen Szene mit unterschiedlichen Texturen aufgenommen, erzeugen eine viel höhere Anzahl von Bildpunkten. Die Auflösung vergrößert sich. Neben der Auflösung steigt auch die Robustheit der Daten auf schwierigen Oberflächen, da die verschobenen Musterstrukturen zusätzliche Informationen aufbringen. Damit entspricht die Ensenso N35 den Anforderungen des Kunden: die möglichst präzise und rauscharme Erfassung der Holzflächen.
")
Das vom ZfT entwickelte System rechnet die erfassten Rohdaten um, bestimmt die Lage der Punktwolke im Roboterkoordinatensystem und extrahiert die potenziell zum Druck geeigneten Ebenen auf dem Balken. Aus diesen Daten werden die Druckposition sowie die optimale Druck-Größe und Ausrichtung für den vorgegebenen Text berechnet. Anschließend fährt der Roboter die mittels Kamerasystem ermittelten Druckpositionen an und führt mit dem Tintendrucker präzise den eigentlichen Druck durch.
„Entscheidend für unsere Kameraauswahl war die Mess-Genauigkeit der Kamera im Erfassungs-Volumen, sowie die Geschwindigkeit der Messung“, erklärt Florian Leutert, wissenschaftlicher Mitarbeiter beim ZfT. „Zusätzliche Pluspunkte sind die Kompaktheit der N35 sowie der Staub-/Feuchtigkeits-Schutz.“ Die Schutzart spielt für die Holzverarbeitung in der Sägewerksumgebung eine große Rolle. Dafür ist das robuste, kompakte Aluminiumgehäuse der Ensenso N35 3D Kamera perfekt geeignet. Sie erfüllt die Anforderungen der Schutzart IP65/67 und ist somit vor Schmutz, Staub, Spritzwasser und in diesem Fall vor Tinte geschützt.
Das im Lieferumfang enthaltene Ensenso SDK wird zum Setzen der Kameraparameter sowie zum Triggern der Messung und Auslesen der gemessenen 3D-Punktwolke verwendet. Zur Transformation und Weiterverarbeitung der Daten hat das ZfT eine eigene Software entwickelt.

Ausblick
„In der Robotik werden zunehmend nicht nur starre Automatisierungslösungen benötigt, sondern automatische Verarbeitungssysteme, die flexibel mit verschiedenen Werkstücken und Umgebungen umgehen können“, definiert Florian Leutert künftige Anforderungen. Dafür werden qualitativ hochwertige Kameras gebraucht, denn die 3D-Erfassung des Arbeitsraumes muss in der vom Robotiksystem benötigten Genauigkeit, d.h. möglichst im Submillimeterbereich, erfolgen. Kein Problem für die Ensenso Stereo-3D-Modelle von IDS: damit wird 3D-Vision nicht nur robust und einfach, sondern auch schnell und präzise. Sie bilden eine zuverlässige und zukunftsträchtige Komponente für die automatische 3D-Erfassung unterschiedlicher Teile, nicht nur als wachsames „Holzauge“ für die holzverarbeitende Industrie.
Zentrum für Telematik e.V.
Das Zentrum für Telematik e.V. informiert in unabhängiger und kompetenter Weise die Industrie hinsichtlich der Chancen beim Einsatz von Telematik-Techniken. Insbesondere bietet es der Industrie Unterstützung bei der Entwicklung von innovativen Produkten und Dienstleistungen an. Anwendungsschwerpunkte liegen in der Fernwartung und Fern-Inbetriebnahme von Industrieanlagen, bei der Sicherheitsüberwachung, Unterstützung von Hilfskräften in Gefahrensituationen, in der Telemedizin, der Fern-Ausbildung und der Verkehrssteuerung.

Ensenso 3D-Kamera
Verwendetes Modell: Ensenso N35

Seit über zehn Jahren erstellt sie Pressemeldungen und Anwendungsberichte und gestaltet Corporate-Themen sowie technische Produktkommunikation mit entsprechender Expertise. Dank ihrer Erfahrung in strategischer B2B-Kommunikation formuliert sie präzise Botschaften und liefert fundierte, fachlich belastbare Inhalte – stets mit Blick auf Authentizität und Klarheit.
Ihr Projekt
Wie können wir Sie in Ihrem Projekt unterstützen? Gemeinsam finden wir die passende Lösung für Sie!
Vision Channel
Videos und Live Sessions rund um Machine Vision.
Newsletter
Bleiben Sie auf dem neuesten Stand und abonnieren Sie unseren Newsletter.
Anwendungen
Entdecken Sie, wie Industriekameras die Zukunft gestalten.