
Ensenso 3D Verfahren
Wie funktioniert KI Laserpunkt Triangulation?
Dreidimensional Sehen mit strukturiertem Licht
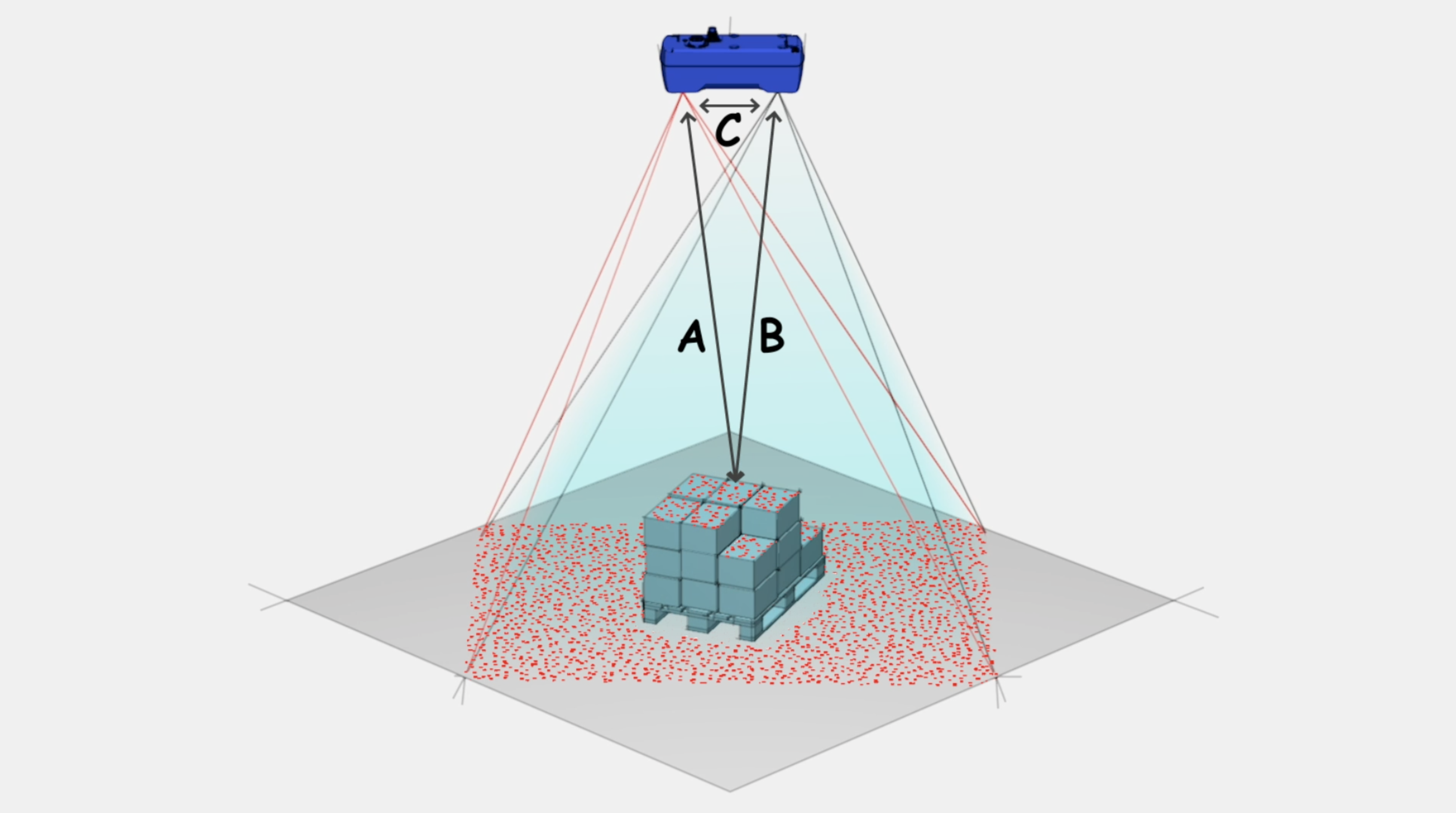
Ensenso Kameras der S-Serie arbeiten mit strukturiertem Licht. Ein Infrarot (IR) -Laser projiziert ein unregelmäßiges Muster von Punkten in den Objektraum, welche von einer Kamera aus einer etwas anderen Position aufgenommen werden. Das Punktmusterbild variiert jedoch an Stellen, wo Objekte das Licht reflektieren. Die entsprechenden Laserbildpunkte weichen, je nachdem, wie weit ein Objekt von der Lichtquelle entfernt ist, von ihrer erwarteten Position ab. Die Abweichungen der Punkt-Positionen bilden die Grundlage der Tiefeninformationen.
Im Gegensatz zu den ebenfalls auf Laserlicht basierenden 3D-Verfahren LIDAR oder Time of Flight (ToF) resultiert die räumliche Tiefe jedes erfassten Projektionspunkts und damit der Punktwolke nicht aus Messungen der Lichtlaufzeit, sondern aus einer Triangulation, wie sie bei den Ensenso Stereo Vision Kameras eingesetzt wird.
Basis dieser Berechnung ist eine Abweichung der Laserpunktposition (= „Disparity“), die wie beim räumlichen Sehen (Stereo Vision) aus zwei Betrachtungswinkeln resultiert. 3D-Verfahren wie das der Ensenso S nehmen den Objektraum aber nur mit einer Kamera auf. Wie ist es möglich, Positionsunterschiede der Punkte aus einem einzigen Kamerabild des projizierten Musters zu extrahieren?
Der Projektor selbst ist die Quelle der notwendigen Informationen. Die sogenannte DOE-Projektion (diffraktive Optik) erzeugt ein fest vorgegebenes "Punktbild" dessen Punktpositionen damit bekannt sind. Mit dem Wissen über Abstand und Betrachtungswinkel der beiden Punktebilder kann das Triangulationsverfahren der Ensenso Software die 3D-Koordinaten jedes (sichtbaren) Laserpunktes bestimmen.
Strukturiertes Licht
Der IR-Laser projiziert eine festgelegte Anordnung von Lichtpunkten in den Objektraum. Zur Erzeugung des Punktmusters wird eine sogenannte diffraktive Optik (DOE) eingesetzt. Deren feine Mikrostrukturen sorgen für eine gezielte Aufteilung und Beugung (Diffraktion) des Laserlichts, so dass die gewünschte Lichtverteilung entsteht.
Das DOE ermöglicht eine gleichmäßige Intensitätsverteilung des Lichts und sorgt zudem für eine fast verlustfreie Emission der Strahlenergie. In Verbindung mit dem schmalbandigen Laserlicht kann damit selbst bei niedriger Umgebungsbeleuchtung ein Punktmuster mit sehr hohem Kontrast erzeugt werden.
KI-beschleunigtes Punkt-Matching
Für die Berechnung der Tiefeninformation mittels Triangulation muss zuerst für jeden Projektionspunkt der zugehörige Bildpunkt ermittelt werden. Jedoch einen Punkt unter vielen zu identifizieren ist keine triviale Aufgabe für regelbasierte Bildverarbeitungsalgorithmen, wenn die erwarteten Punktpositionen durch Lichtreflexionen an Objekten verschoben sind. Die Lösung heißt "Künstliche Intelligenz".
Welche Technologie wäre besser geeignet, um Merkmale mit unzähligen Variationen zu erkennen und zu klassifizieren? Die Ensenso Software setzt deshalb für die Punktidentifikation im Kamerabild ein KNN (Künstliches Neuronales Netz) ein, das im Vorfeld mit Verkippungen und Verzerrungen des eingesetzten Musters trainiert wurde.
Vorteile der KI Laserpunkt Triangulation
Hohe Tiefengenauigkeit
Robuste und geometrisch präzise 3D-Daten* mit hoher Tiefengenauigkeit durch hohe Trefferquote des KNN-Punktmatchings
Geringe Umgebungsbeleuchtung
Einsatz bei niedriger Umgebungsbeleuchtung durch IR-Beleuchtung
Schnelle Aufnahme
Schnelle Bildaufnahme und Auswertung, da nur ein Kamerabild verarbeitet wird

KI Beschleunigung
Bis zu 20 Punktwolken pro Sekunde durch die KNN-Beschleunigung

Keine Bewegungsunschärfe
Ideal für bewegte Objekte ohne Bewegungsunschärfe bei kurzer Belichtungszeit und hoher Laser Emission
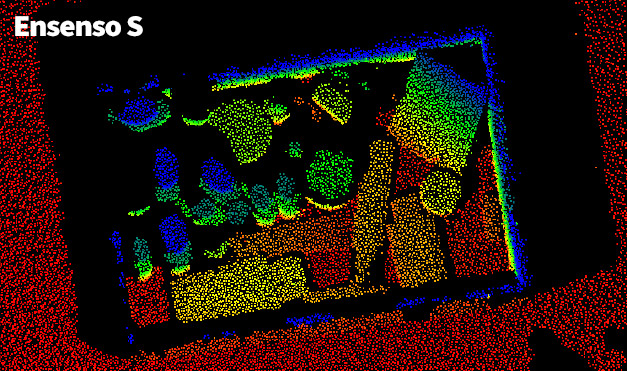
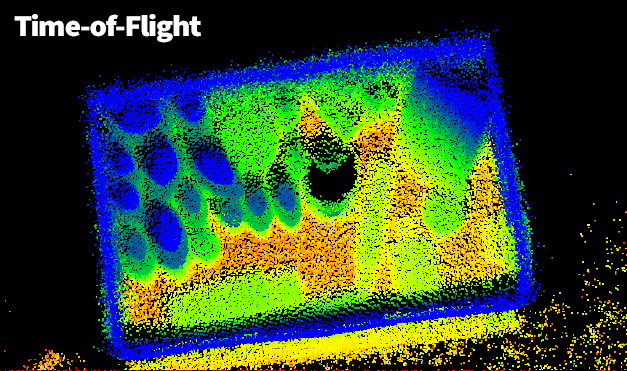
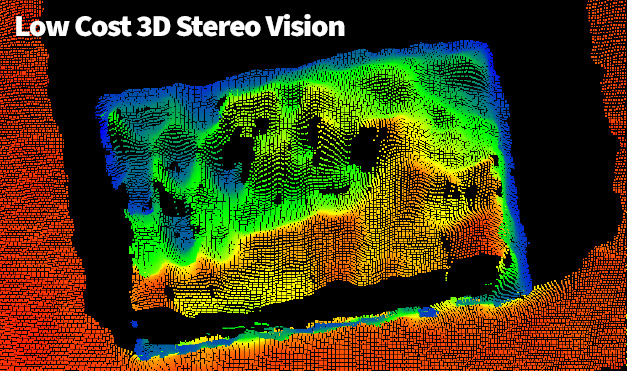
(*) Ensenso S10 erzeugt geometrisch präzise 3D-Daten mit hoher Tiefengenauigkeit im Vergleich zu 3D Kameras mit Time of Flight (ToF) oder Low Cost 3D Stereo Vision Verfahren.
Ensenso Selektor
Zur einfachen Auswahl der Komponenten unterstützt Sie unser Ensenso Kameraselektor. Nach Eingabe Ihrer Arbeitsbedingungen in den Online-Konfigurator, erhalten Sie die bestmöglichen Kombinationen für Ihre Anwendung.


