Adaptive Automation
Mit 3D Daten zum autonomen Roboter
Bisher waren Roboter „blinde“ Befehlsempfänger, die vorgegebenen und fest definierten Bahnen folgen. Mittels 3D-Daten können sich Roboter der jeweiligen Situation adaptiv anpassen und auf ihre Umgebung reagieren. Ein Versprechen wird Realität. Der Roboter wird zu einem autonom arbeitenden Mitarbeiter.
Vorteile: Schnelle Umrüstzeiten, hohe Varianz von Werkstücken, einfaches Teach-IN, vereinfachte Teilezuführung bei gleichbleibend hohem Automatisierungsgrad.

Jeder Prozessschritt durchdacht, alle Eventualitäten ausgeschlossen. Durch Automatisierung kann sehr effizient mit hohen Stückzahlen gefertigt werden. Hohe Spezialisierung verbessert die Effizienz noch weiter. Die Flexibilität und schnelle Umrüstung dieser spezialisierten aber kostspieligen Anlagen bleibt auf der Strecke. Schnell eine kleine Serie alternativer Teile fertigen, rechnet sich nicht. Jeder Prozessschritt müsste angepasst werden. Kleinserien werden oft mühselig in Handarbeit produziert und gefertigt. Flexibel, kostensparend aber langsam und nicht Prozess-stabil.
Roboter arbeiten situationsbezogen
Die Entwicklung von 3D-Kameras und 3D-fähiger Software eröffnete der Branche die Erschließung ganz neuer Machine Vision Technologien. Durch 3D-Vision können neue Aufgaben gelöst werden, die mit 2D nicht realisierbar sind.
Ein Roboter entnimmt sicher und zuverlässig unsortiert und überlagernd liegende Rohr-T-Stücke direkt aus einer kleinen Transportkiste. Ein anderer Roboter depalettiert große Alugussteile direkt auf ein Förderband. Feinfühlig findet sein robuster Greifer sicheren Griff. Schon beim ersten Versuch ohne die geringste Kollision mit dem Werkstück, obwohl die Teile auf den gebrauchten oder schmutzigen Paletten oft verdreht oder durch restliche Gussrückstände schief stehen. Für diesen „Griff in die Kiste“ (Bin-Picking) und das lagerichtige Übergeben von Teilen musste die Robotik deutlich zulegen.
Der Freiburger Systemintegrator isys vision entwickelte dafür eine Lösung mit der Bezeichnung „MIKADO Adaptive Robot Control“ (kurz: ARC). Eine konfigurierbare Robotersteuerung, mit eigener Bahnplanung und Kollisionsprüfung. Mit einer eigenen inversen Kinematik werden die Gelenkwinkel der Roboterarme für Greifpositionen oder Verfahrwege berechnet. Ausgangspunkt für die komplexen Berechnungen sind 3D-Informationen wie die Werkstückform, die Position, die Lage oder eine virtuelle Abbildung der Umgebungssituation. Eine Vielzahl marktüblicher Roboter können über MIKADO ARC gesteuert werden und machen langwieriges Programmieren überflüssig. Teilewechsel sind schnell realisiert, sodass auch die Produktion von Kleinserien mit diesem robotergestütztem Material-Handling ermöglicht wird.

3D Kameras erfassen die Situation
Ausschlaggebend für eine optimale Steuerung des Roboters sind die Ausgangsdaten. Je nach Projekt und Anwendung entscheidet sich der Integrator für die geeignete 3D-Kamera-Technologie. Dabei spielen neben der generellen Eignung eines Verfahrens sowohl Kosten als auch Genauigkeit, Geschwindigkeit und robuste Datenerhebung eine Rolle.
Die klassischen Verfahren wie z.B. Time-of-flight (TOF), Stereo Vision oder Lasertriangulation lassen sich nur als Vorauswahl gegeneinander abwägen. Denn viele der heute eingesetzten 3D Kameras sind Hybridsysteme und setzen mehrere Verfahrensmerkmale ein, um ein breiteres Einsatzspektrum abzudecken und die Ergebnisse zu verbessern.
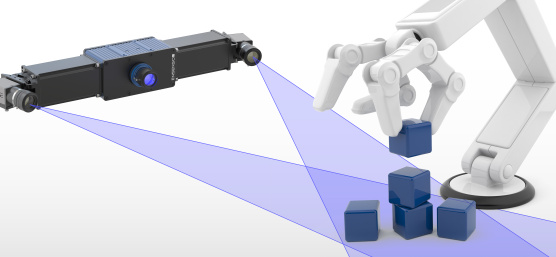
isys vision verwendet für Bin-Picking und Material-Handling 3D-Stereovision-Kameras von Ensenso. Diese bestehen aus zwei Flächenkameras, die nach dem Prinzip der Stereovision arbeiten, in Verbindung mit einem leistungsstarken Patternprojektor, um selbst von Werkstücken mit schwierigen Oberflächen robuste 3D-Daten zu erhalten. Dabei eignen sich die kompakten Kameras der N-Serie vor allem im Nahbereich und werden meist direkt am Kopf des Roboters als mobiles Auge eingesetzt. Das neue 3D System der X-Serie kann mit ihrer flexiblen Baseline sehr variabel mit verschiedenen Kameras von IDS Imaging Development Systems GmbH aus größeren Abständen große Volumen erfassen und eignet sich optimal für unsortiertes Material-Handling aus großen Gitterboxen. Durch die 100 W Leistung erzeugt das LED-Licht des Projektors auch bei großen Arbeitsabständen von 5 m noch feinste Texturen auf der Werkstückoberfläche.
Mit variabler Baseline und einem 100 W Texturprojektor lassen sich mit Stereovision Kameras der Ensenso X-Serie Arbeitsabstände bis circa 5 Meter realisieren und Objekte mit Volumen von mehreren Kubikmetern erfassen.

Dadurch ist das System unabhängig vom Umgebungslicht und erlaubt kurze Belichtungszeiten. Schon mit 1-2 Bildpaaren sind 3D-Auflösungen von wenigen Millimeter möglich. Mit kurzen Belichtungszeiten, wenigen Bildaufnahmen und sehr schnellen Stereobild-Matching-Algorithmen sind 3D-Daten schon nach etwa 500 ms bereit zur weiteren Verarbeitung. Damit sind sehr hohe Taktzeiten im Material-Handling möglich.
Weitere Vorteile durch den Einsatz von zwei Flächenkameras liegen auf der Hand. Neben der 3D-Datenerhebung durch die Stereovision können mit dem Rohbildmaterial der Flächenkameras auch Referenzmerkmale einer Szene erfasst und zur stetigen Nachjustierung des maschinellen Sehens verwendet werden. Die Prozessergebnisse bleiben konstant und robust. Wiederkehrende Kontrolle bzw. aufwendiges Rekalibrieren des Stereovision Systems ist nicht mehr notwendig.
Mit Fähigkeiten wie Bin-Picking und lagerichtiger Teilezuführung kann die Robotik in Zusammenarbeit mit MIKADO ARC und Ensenso 3D-Kameras die Lücke zur adaptiven Automation schließen. Selbst Kleinserien können damit einfach und kosteneffizient automatisiert werden.

Dipl.-Ing. Heiko Seitz ist seit 2001 bei IDS tätig. Nach Jahren als Entwickler im Bereich Kamerasoftware unterstützt er heute als Product Marketing Manager die technologische Kommunikation bei IDS. Mit seiner Erfahrung schlägt er die Brücke zwischen komplexer Technik und praxisnaher Wissensvermittlung – etwa in Fachbeiträgen, Webinaren oder Vorträgen.
Vision Channel
Videos und Live Sessions rund um Machine Vision.
Ihr Projekt
Wie können wir Sie in Ihrem Projekt unterstützen? Gemeinsam finden wir die passende Lösung für Sie!
Newsletter
Bleiben Sie auf dem neuesten Stand und abonnieren Sie unseren Newsletter.