
Ensenso N-Serie
3D-Stereo-Vision - Präzise, robust und einfach
GigE Schnittstelle
Plug & Play
CMOS Sensor
3D-Vision
Verschraubbare Stecker
Power-Over-Ethernet
Schutzart IP65/67
Trigger & Blitz
Leicht
Vorkalibriert
Das robuste und kompakte 3D-Stereo-Kamerasystem
Die Ensenso N-Serie ist speziell für den Einsatz in rauen Umgebungsbedingungen konzipiert. Durch ihre kompakte Bauform ist die N-Serie platzsparend stationär oder im mobilen Einsatz auf einem Roboterarm gleichermaßen für die 3D-Erfassung bewegter und statischer Objekte geeignet. Der integrierte Projektor projiziert auch bei schwierigen Lichtverhältnissen, mittels einer Pattern-Maske mit zufälligem Punktemuster, eine kontrastreiche Textur auf das abzubildende Objekt und ergänzt somit die auf dessen Oberfläche nicht oder nur schwach vorhandenen Strukturen. Alle Kameras sind vorkalibriert und somit einfach einzurichten.


Industrietauglich
Durch die verschraubbaren GPIO-Stecker für Trigger und Blitz sind zudem alle Modelle industrietauglich. Für besonders hohe Ansprüche an Robustheit sind sowohl Ensenso N3x- und Ensenso N4x- 3D-Kameraserien mit IP65/67 Schutzart verfügbar und somit vor Schmutz, Staub, Spritzwasser oder Reinigungsmitteln geschützt.
Leicht und kostenoptimiert – die N4x-Serie
Die vollständig vom Gehäuse entkoppelte 3D-Stereo-Elektronik der neuen N4x-Serie ermöglicht die Verwendung eines leichten Kunststoffverbunds als Gehäusematerial und damit eine kostengünstige Herstellung der 3D-Kamerafamilie.
Durch das reduzierte Gewicht eignen sich Ensenso N4x-Modelle auch für den Einsatz auf kollaborativen Roboterarmen, deren Antriebskräfte zum Schutz des menschlichen Kollegen begrenzt sind. Die Haptik der Kunststoffoberfläche und abgerundete Kanten tragen ebenfalls zur Minimierung von Verletzungen bei.


Für höchste Ansprüche – die N3x-Serie
Das Aluminiumgehäuse der N3x-Modelle gewährleistet eine optimale Wärmeabfuhr der elektronischen Komponenten und damit eine stabile Lichtleistung auch unter extremen Umgebungsbedingungen. Das sichert die konstant hohe Qualität und Robustheit der 3D-Daten.
Die Metallkonstruktion ermöglicht zudem eine sehr flexible und robuste Aufnahme der CMOS-Sensoren mit Vergenzwinkeln von 2° bis 10°, wodurch auch Anwendungsszenarien mit sehr kurzen Objektabständen realisierbar sind.
Vergleichstabelle
N3x |
N4x |
|
|---|---|---|
|
|
|
3D System |
„Projected Texture Stereo Vision“-Verfahren für Aufnahmen texturloser Oberflächen |
„Projected Texture Stereo Vision“-Verfahren für Aufnahmen texturloser Oberflächen |
CMOS Sensoren |
Global Shutter, 1936 x 1216 Pixel (2,3 MP) |
Global Shutter, 1936 x 1216 Pixel (2,3 MP) |
Brennweiten |
6 - 16 mm |
6 - 16 mm |
Musterprojektor |
Blaue (465 nm) oder Infrarot-LEDs (850 nm) + FlexView Musterverschiebung (nur N36) |
Blaue (465 nm) oder Infrarot-LEDs (850 nm) + FlexView Musterverschiebung (nur 46) |
Arbeitsabstand |
min. 270 mm |
min. 330 mm |
Gesichtsfeld |
max. 3970 mm |
max. 3970 mm |
Schnittstelle |
Gigabit Ethernet |
Gigabit Ethernet |
Bilder pro Sekunde |
10 (1,3 MP), 30 (2x Binning) |
10 (1,3 MP), 30 (2x Binning) |
Stromversorgung |
12 V - 24 V DC / PoE (power over ethernet) |
12 V - 24 V DC / PoE (power over ethernet) |
Gehäuse |
Aluminium |
Kunststoffverbund mit abgerundeten Kanten |
Abmessungen (BxHxT) (inkl. Anschlüsse) |
192 x 50 x 52 mm |
193 x 52 x 60 mm |
Gewicht |
650 g |
550 g |
Schutzart |
IP65/67 |
IP65/67 |


*Detaillierte, modellspezifische Werte wie z.B. die Z-Genauigkeit oder die XY-Auflösung finden Sie über den Ensenso Selektor.
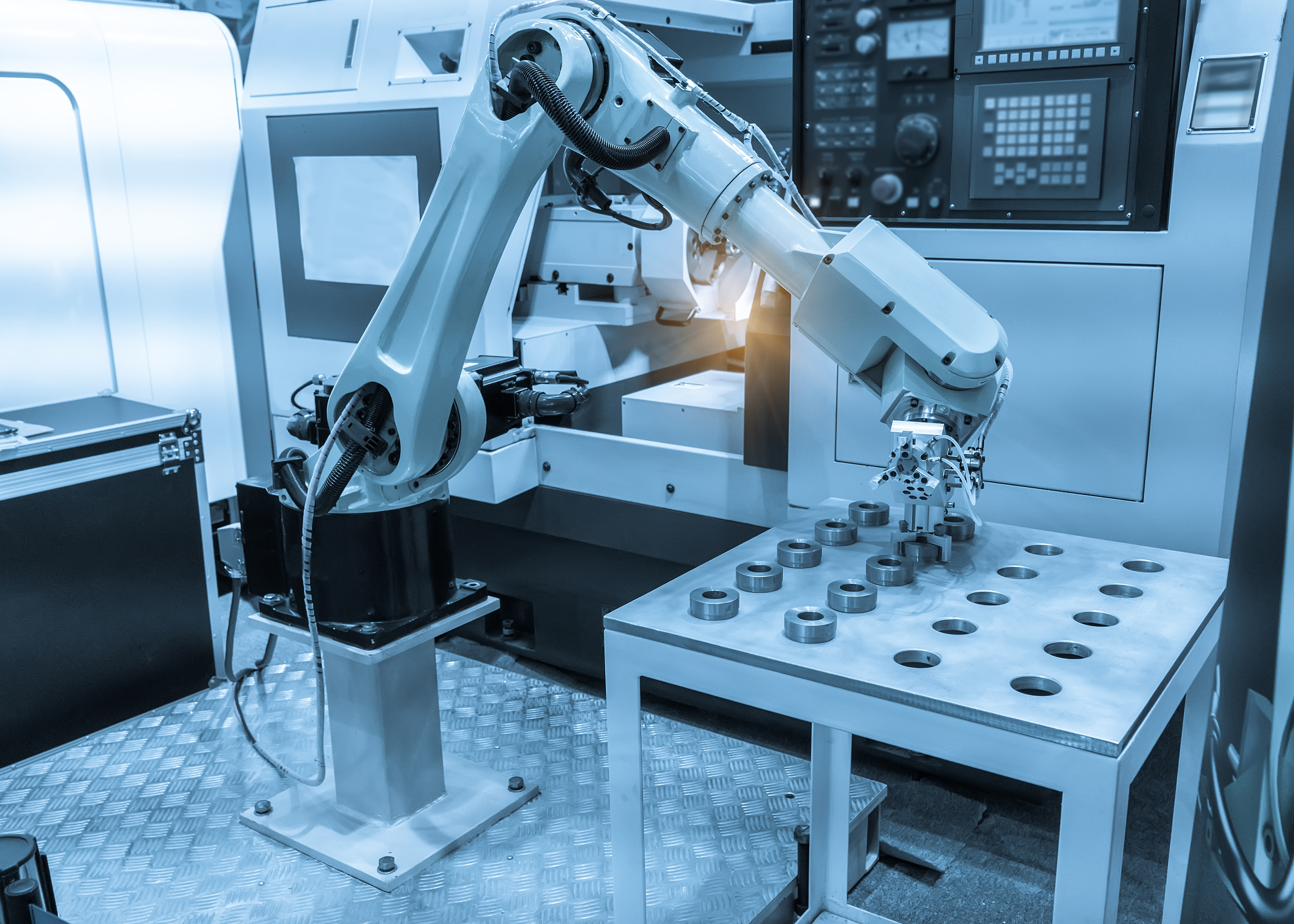
Anwendungen
- 3D Objekterkennung, Lokalisierung & Klassifizierung, z.B. Qualitätskontrollen, Kommissionierarbeiten
- 3D Objektrekonstruktion
- Fabrikautomation
- Roboteranwendungen, wie z.B. Bin Picking oder kollaborative Aufgaben
- Förderbandbestückung
- Logistikautomation, z.B. (De-)Palettisierung
- Automatische Lagersysteme

TM Plug&Play
Die Ensenso N3x 3D-Kameras sind durch Techman Robot „TM Plug&Play“-zertifiziert. Anwender können die 3D-Kameras nun einfach an den IPC von TM Robot anschließen und mit einer 3D-Bin-Picking-Anwendung beginnen, ohne zuvor eine eigene Bildverarbeitungsanwendung entwickeln zu müssen. Dies spart wertvolle Entwicklungs- und Integrationszeit.
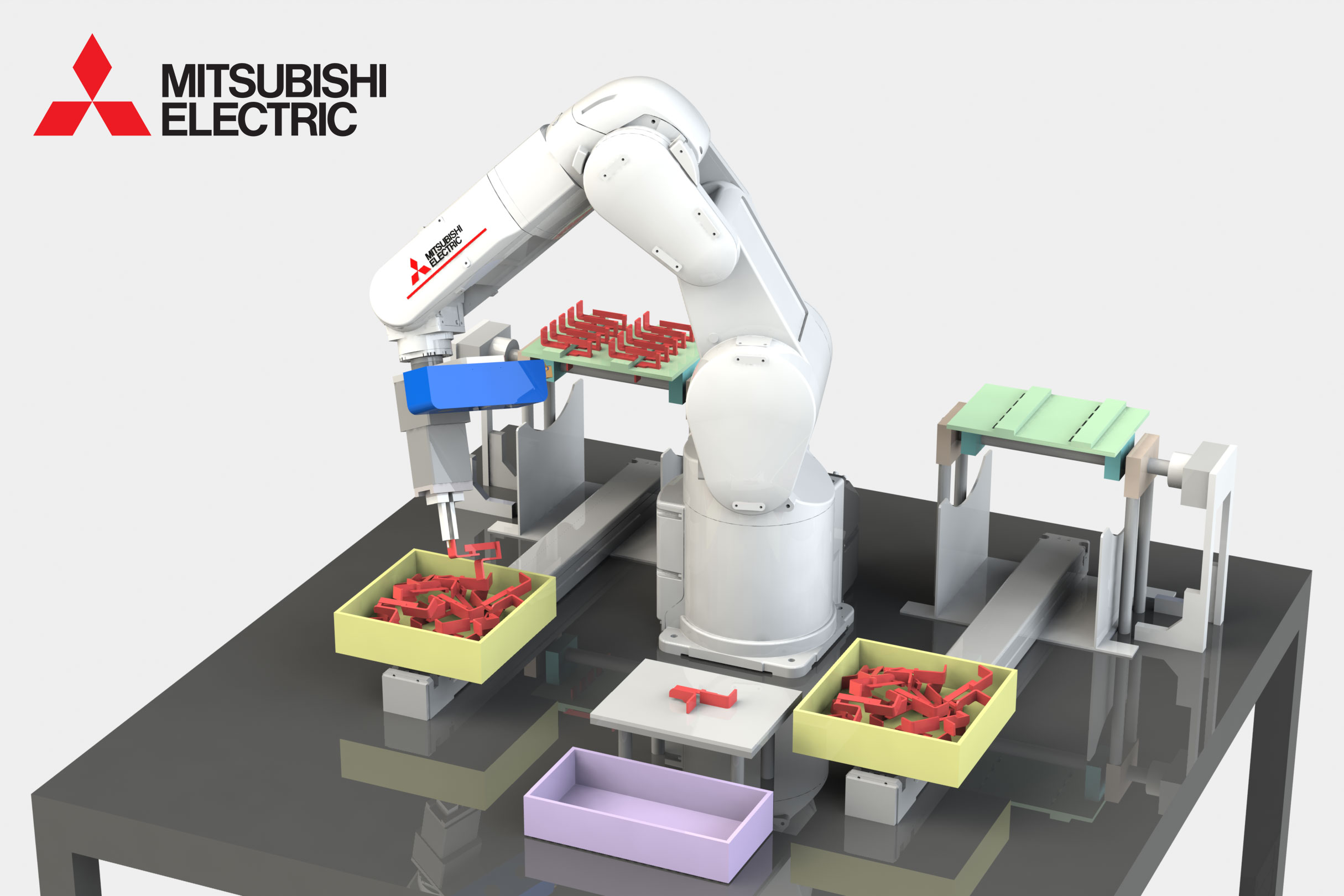
MELFA-3D Vision 3.0
Ensenso N3x wird als Standard-3D-Vision-Kamera für Mitsubishi Electric MELFA-3D Vision 3.0 verwendet, die mit ihrem einzigartigen modelllosen Erkennungsprozess eine Hochgeschwindigkeitskommissionierung von Schüttgut ermöglicht. MELFA-3D Vision 3.0 ist eine Software für 3D-Vision-Sensoren für Kleinroboter, die Teile von geringer Größe in hoher Geschwindigkeit und Messgenauigkeit erfasst.
Sie kann einfach mit der Ensenso N3x-Serie verbunden werden. Ihre kleinen Abmessungen und ihr geringes Gewicht ermöglichen eine flexible Systemkonfiguration. Durch Änderung des Arbeitsabstandes und des Sichtfeldes kann das System in verschiedenen Umgebungen verwendet und von der Präzisionsmontage von Kleinteilen bis hin zur Kommissionierung von großen Paletten flexibel eingesetzt werden.
Die "automatische Kalibrierungsfunktion" richtet den Roboter und die 3D-Kamera automatisch aus. Das erleichtert die Einstellarbeiten enorm.
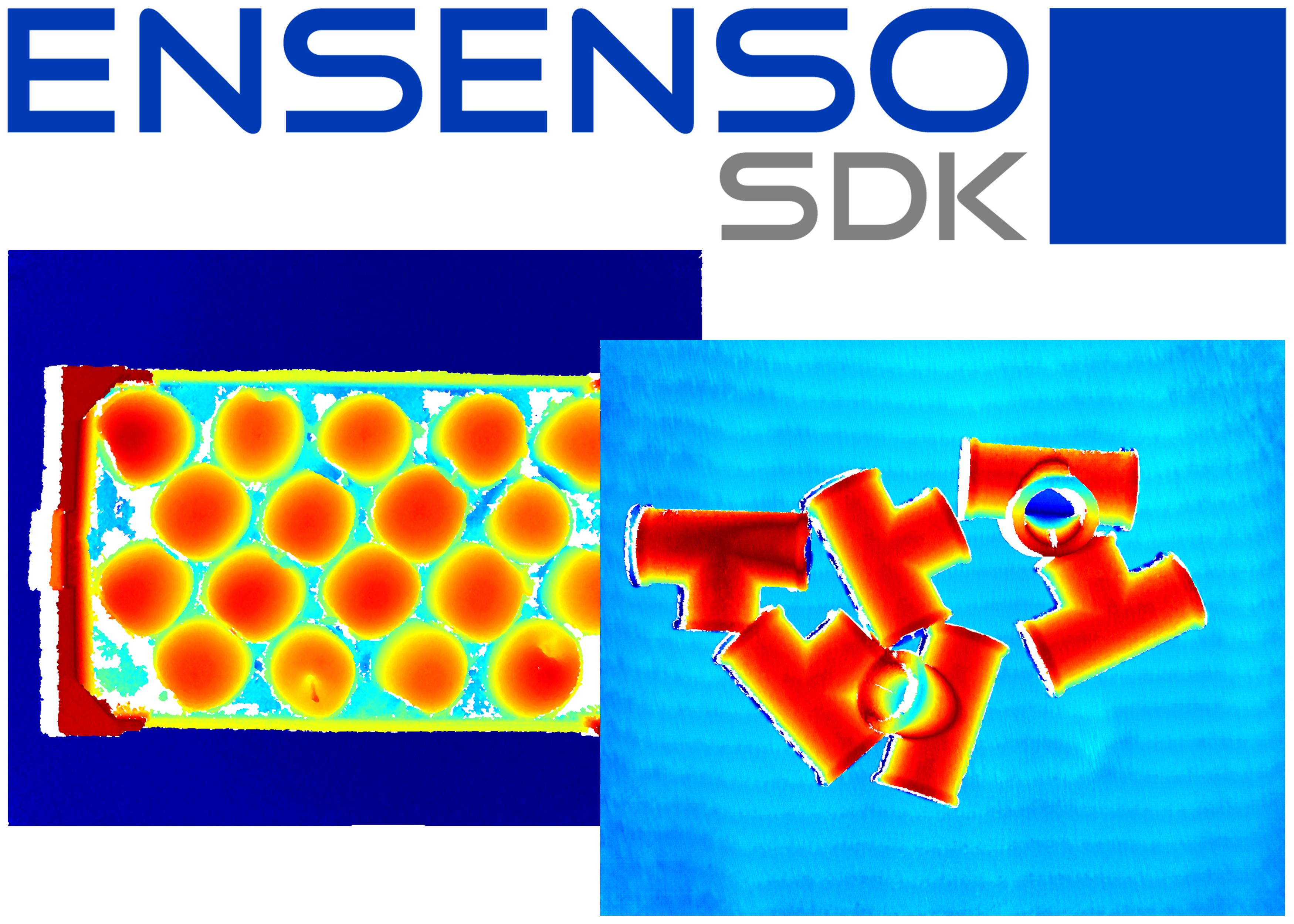
Ensenso SDK
Kameras der Ensenso N-Kamerafamilie sind über das Ensenso SDK einfach einzurichten und bedienbar. Neben Wizards für ein einfaches Setup und zur Unterstützung der Kamerakalibrierung der 3D-Kameras beinhaltet es zudem die Möglichkeit zur GPU-basierten Bildverarbeitung für eine noch schnellere 3D-Datenverarbeitung.
- Ein Softwarepaket (Ensenso SDK für Windows und Linux) für alle Ensenso Modelle
- Beispielprogramme mit Quellcode für MVTec HALCON, C, C++, C#
- Ausgabe einer einzigen 3D-Punktewolke aller im Mehrkamerabetrieb eingesetzten Kameras
- Live-Komposition der 3D-Punktwolken aus mehreren Blickrichtungen
- Roboter-Hand-Auge-Kalibrierung
- Einbindung von uEye Industriekameras, bspw. um zusätzliche Farbinformationen oder Barcodes zu erfassen
Seit dem Release des Ensenso SDKs 3.3 können Sie außerdem mit dem Ensenso PartFinder Objekte in 3D-Punktwolken aus Basis eigener CAD-Geometrien lokalisieren. Die Nutzung des Softwaremoduls erfordert eine eigene Lizenz. Was das Tool kann und welche Vorteile sich daraus für Ihre Anwendungen ergeben, erfahren Sie im Video.
Beispiele aus der Praxis
Planen Sie Ihr Projekt
Ensenso Selektor
Zur einfachen Auswahl der Komponenten unterstützt Sie unser Ensenso Kameraselektor. Nach Eingabe Ihrer Arbeitsbedingungen in den Online-Konfigurator, erhalten Sie die bestmöglichen Kombinationen für Ihre Anwendung.


